During that year I also experimented with a mobility aid for the blind. It featured retina optics that could be aimed at any object and would return audible signals describing linear features and colors.
 000106
000106
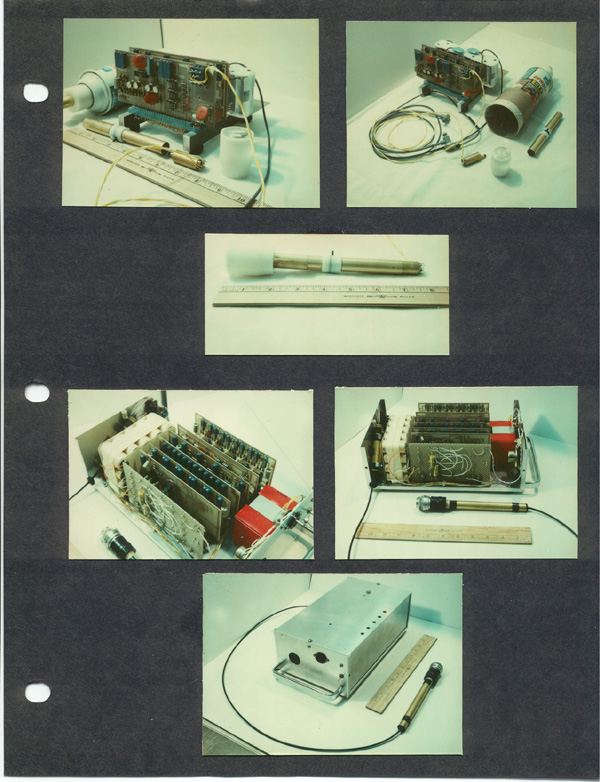
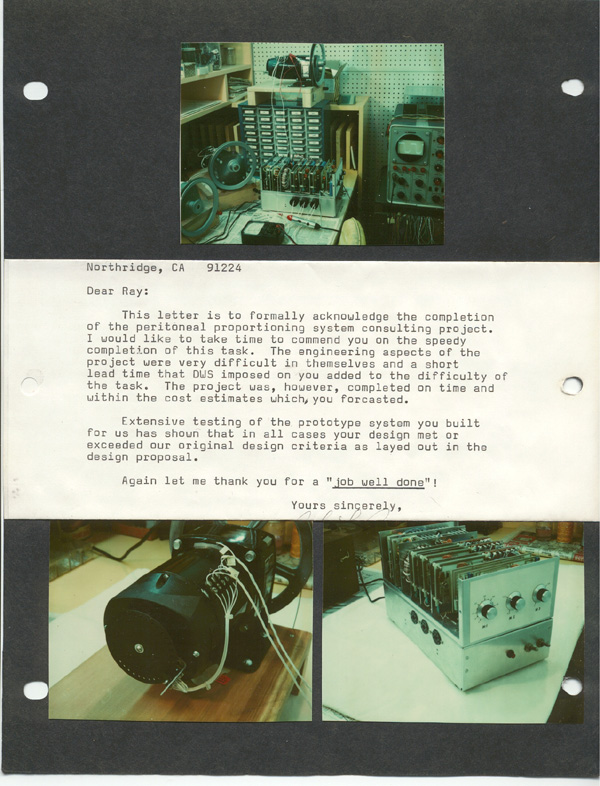
Peristaltic pumps work by squeezing tubing through which a liquid
(typically blood) is flowing. The idea is to avoid contaminating the
liquid. The torque required for driving the rollers is large and
uneven, with an elastic component. Servo control can be a problem.
During that year I also experimented with a mobility aid for the blind. It featured retina optics that could be aimed at any object and would return audible signals describing linear features and colors.
The device -- a wand with an 8mm movie camera lens at the end linked by a fiber-optic cable to a small portable case -- impressed Lawrence Scadden, a blind man in charge of technological aids for the blind at the Smith-Kettlewell Institute in San Francisco. The poor man almost got run over by a car because he was so absorbed "listening" to the white line at a pedestrian crossing. A potential investor refused to invest in the project because someone had already patented the basic idea (but in a much more primitive embodiment).
